
職業(yè)院校(xiào)作(zuò)為(wèi)技(jì)術(shù)技(jì)能(néng)型人(rén)才培養的(de)搖籃,承擔著(zhe)主要(yào)的(de)人(rén)才π培養職能(néng)。
智能(néng)制(zhì)造實驗實訓中心是(shì)課程體(tǐ)系改革與建設的(de)依托,是(shì)專業(yè)課程內(nèi)容與崗位技(j•ì)能(néng)标準有(yǒu)效對(duì)接的(de)重要(yào)保證,是(shì)培養學生(shēng)崗位技(jì)術(shù)技(jì)能(néng)的(de)重要(yào)載體(tǐ)。
中國(guó)制(zhì)造2025
智能(néng)制(zhì)造實訓中心
智能(néng)制(zhì)造公共基礎實驗實訓平台
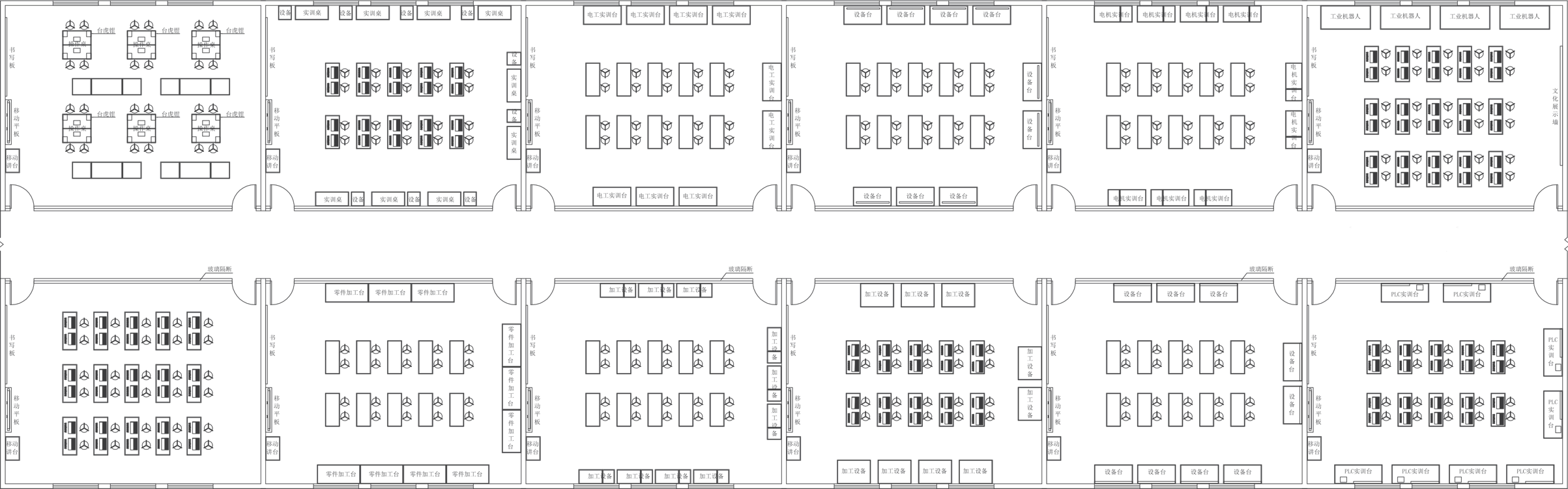
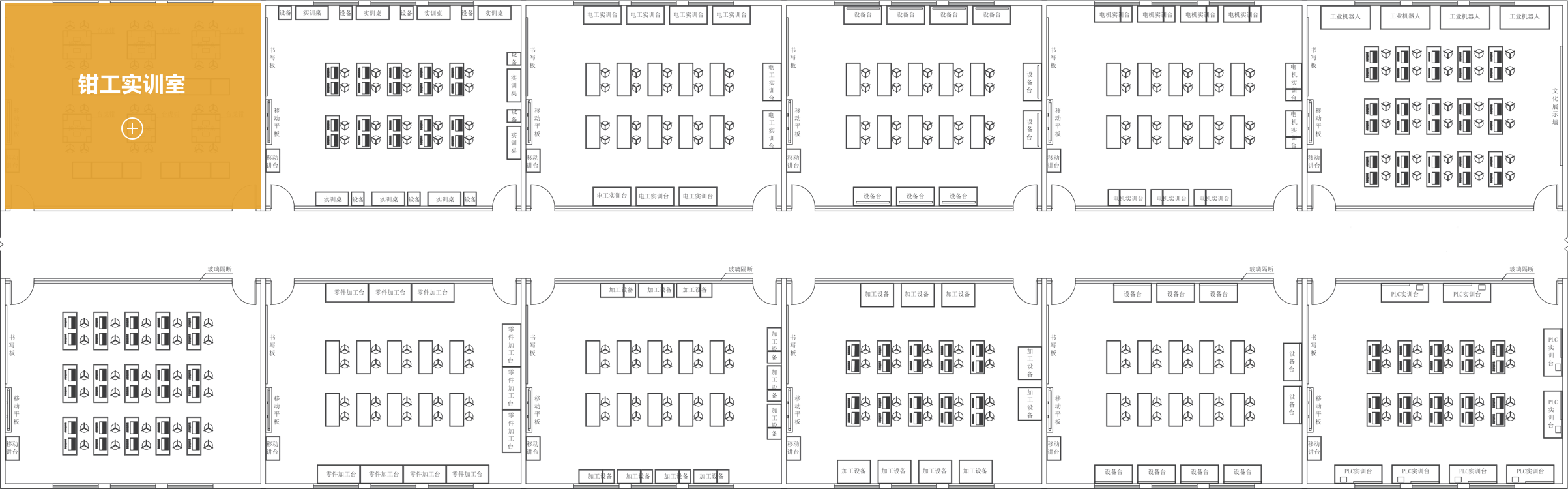
鉗工(gōng)實訓室
鉗工(gōng)實訓室是(shì)通(tōng)過實訓可(kě)以是(shì)學生(shēng)熟悉各種工(gōng)、量具的(de)>使用(yòng),掌握鋸锉、錾、劃線、測量、鑽孔、攻絲、套死、裝配刀(dāo)具刃磨等各種鉗工(gōng)的(de)基本技(jì)能$(néng),提高(gāo)學生(shēng)的(de)鉗工(gōng)工(gōng)藝水(shuǐ)平。
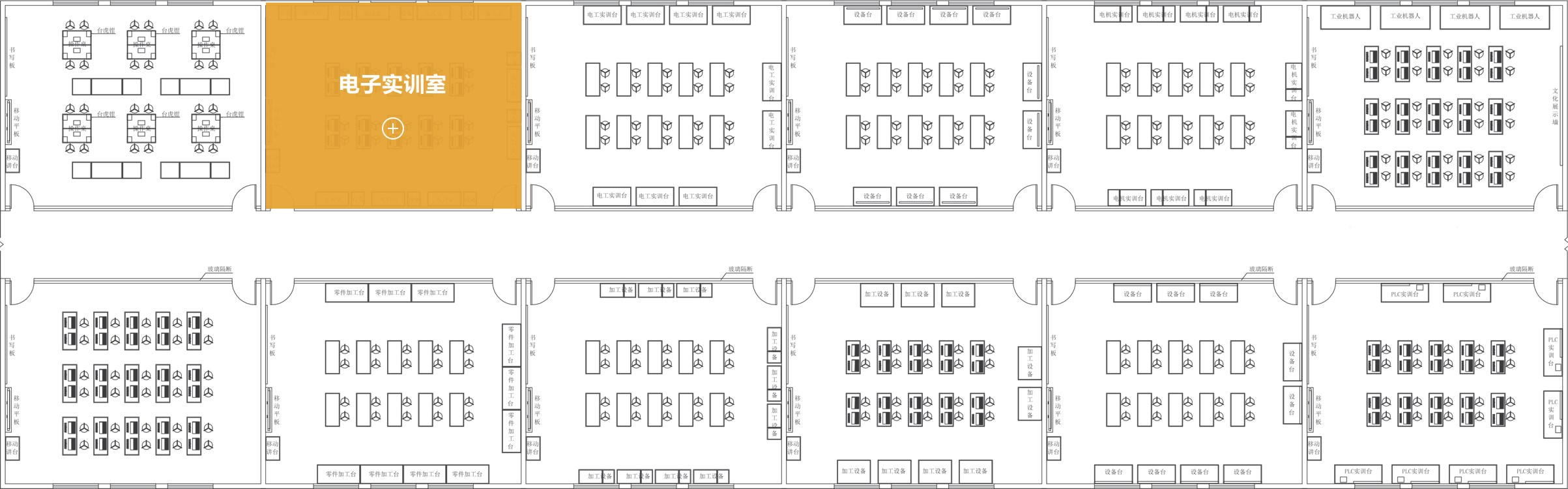
電(diàn)子(zǐ)實訓室
電(diàn)子(zǐ)實訓室側重于電(diàn)子(zǐ)基礎理(lǐ)論驗證性實驗教學和(hé)電(diàn)子(zǐ)基本操作(zuò)技(jì)能(néng)的(de)訓練,以培養學生(s♥hēng)理(lǐ)論聯系實際,分(fēn)析、解決問(wèn)題的(de)能(néng)力和(hé)實踐動手能(néng)力。
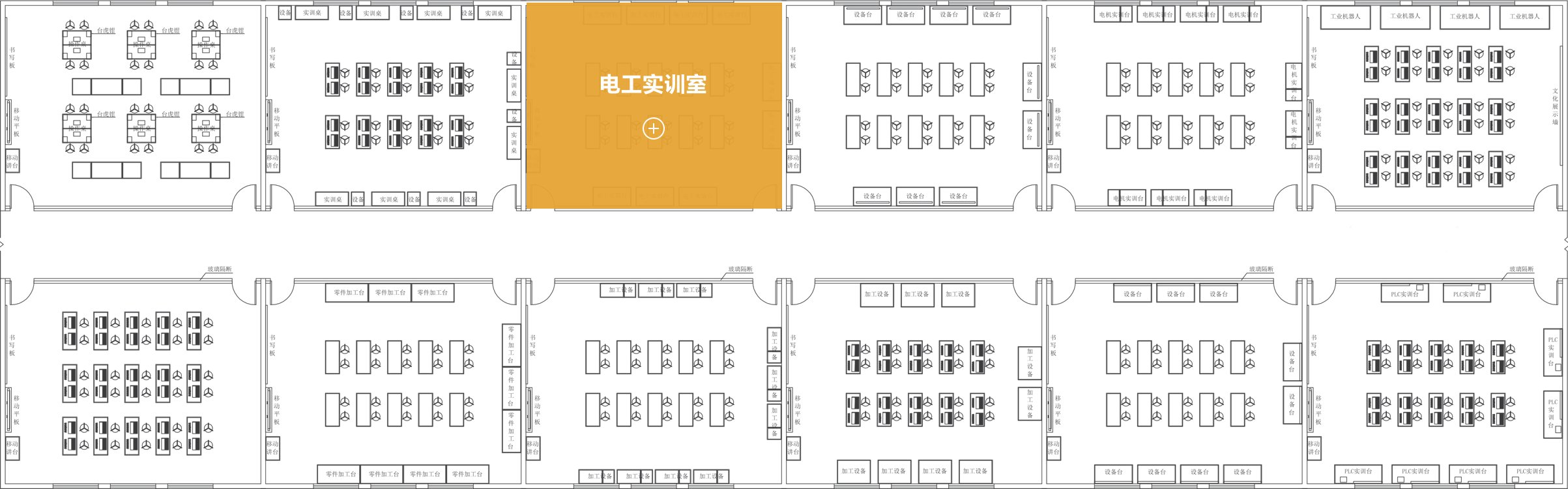
電(diàn)工(gōng)實訓室
主要(yào)進行(xíng)模拟項目開(kāi)始進行(xíng)訓練,讓學生(shēng)能(néng)夠在學習(xí)的(de)過程中理(lǐ)論與實際得(de)到(dào)共同的(∑de)發展。
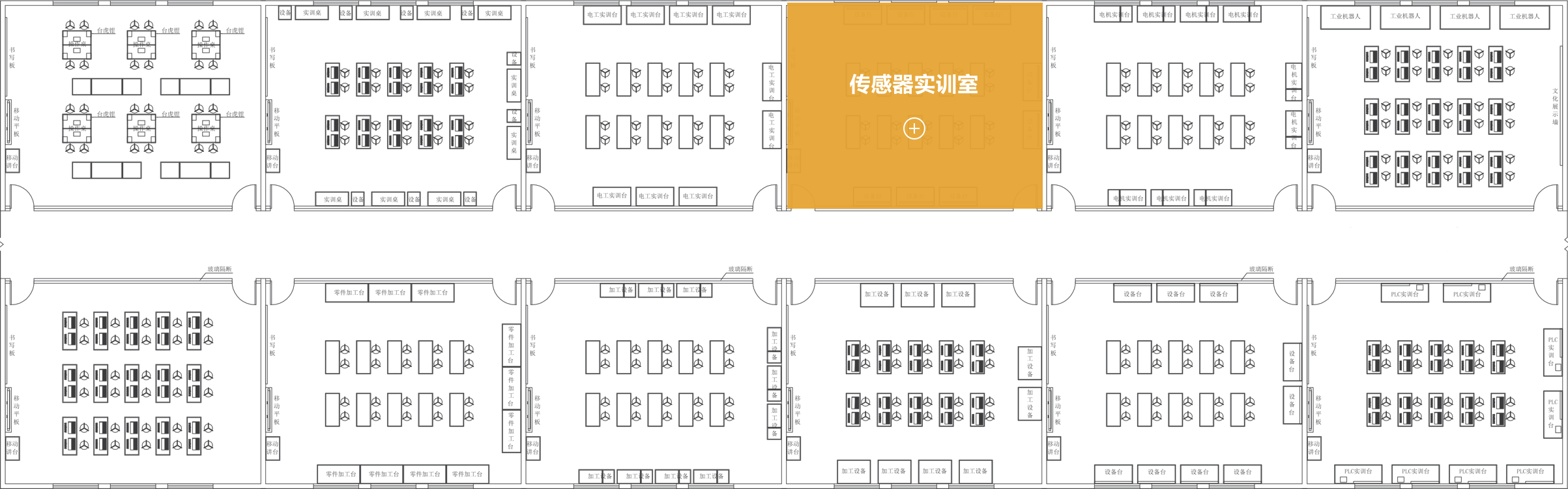
傳感器(qì)實訓室
傳感器(qì)實訓室是(shì)機(jī)電(diàn)工(gōng)程系專業(yè)實訓室之一(yī),該實訓室可(kě)承擔機(jī)電(diàn)系應用(yòng)電(diàn)Ω子(zǐ)技(jì)術(shù)、機(jī)電(diàn)一(yī)體(tǐ)化(huà)技(jì)術(shù)、電(diàn)氣自(zì)動化(huà)技(jì)術✔(shù)專業(yè)的(de)傳感器(qì)技(jì)術(shù)與應用(yòng)課程的(de)實驗或 實訓。
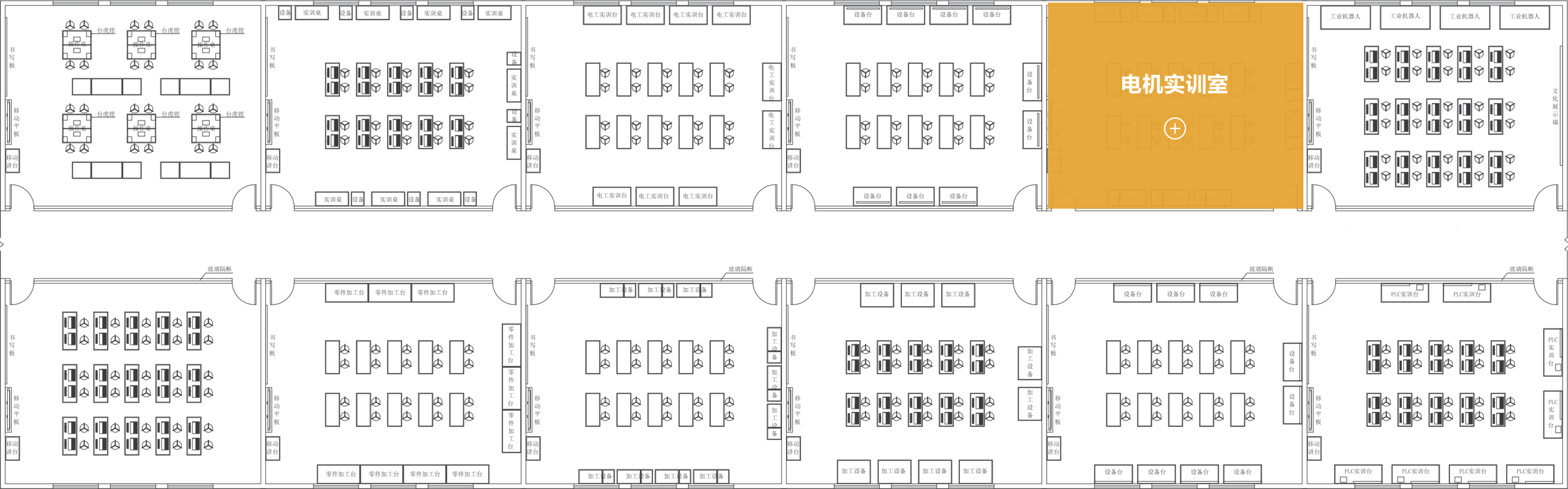
電(diàn)機(jī)實訓室
電(diàn)機(jī)綜合實訓室可(kě)為(wèi)我系現(xiàn)有(yǒu)的(de)各專業(yè)服務,主要(yào)用(yòng)于完成《電(diàn)<機(jī)學》、《電(diàn)機(jī)與電(diàn)氣控制(zhì)》、《電(diàn)力拖動技(jì)術(shù)》、《機(jī)床電(d¶iàn)氣控制(zhì)技(jì)術(shù)》等專業(yè)課程的(de)實驗、實習(xí)和(hé)實訓任務。
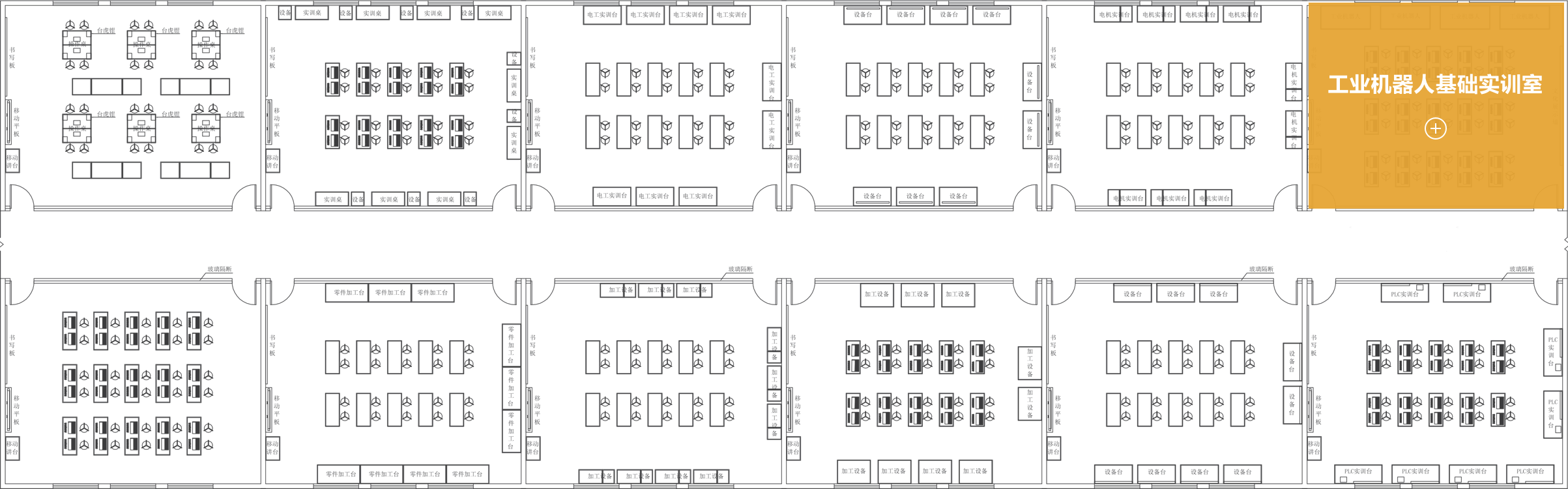
工(gōng)業(yè)機(jī)器(qì)人(rén)基礎實訓室
通(tōng)過系統的(de)實訓課程訓練,使學生(shēng)掌握工(gōng)業(yè)機(jī)器(qì)人(rén)應用(yòng)系統的(de)組成、編程、調試以及幾點設•備的(de)安裝方面的(de)知(zhī)識與技(jì)能(néng)。
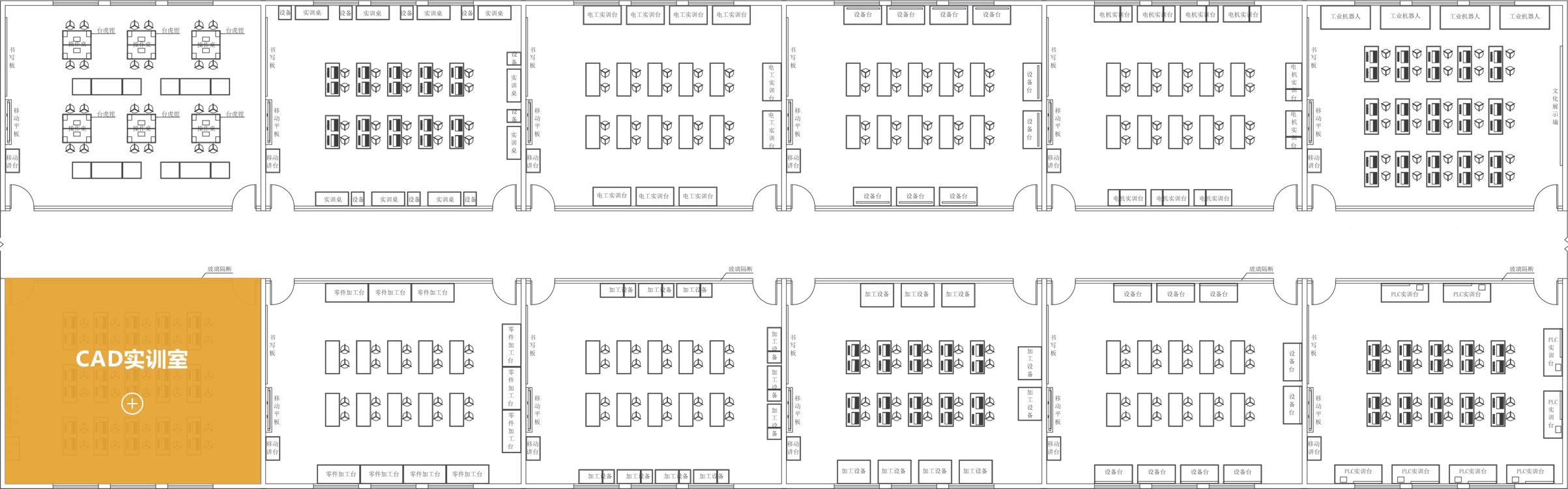
CAD實訓室
CAD實訓室主要(yào)承擔著(zhe)電(diàn)氣、機(jī)電(diàn)、機(jī)制(zhì)、數(shù)控和(hé•)焊接專業(yè)CAD教學和(hé)實訓任務。
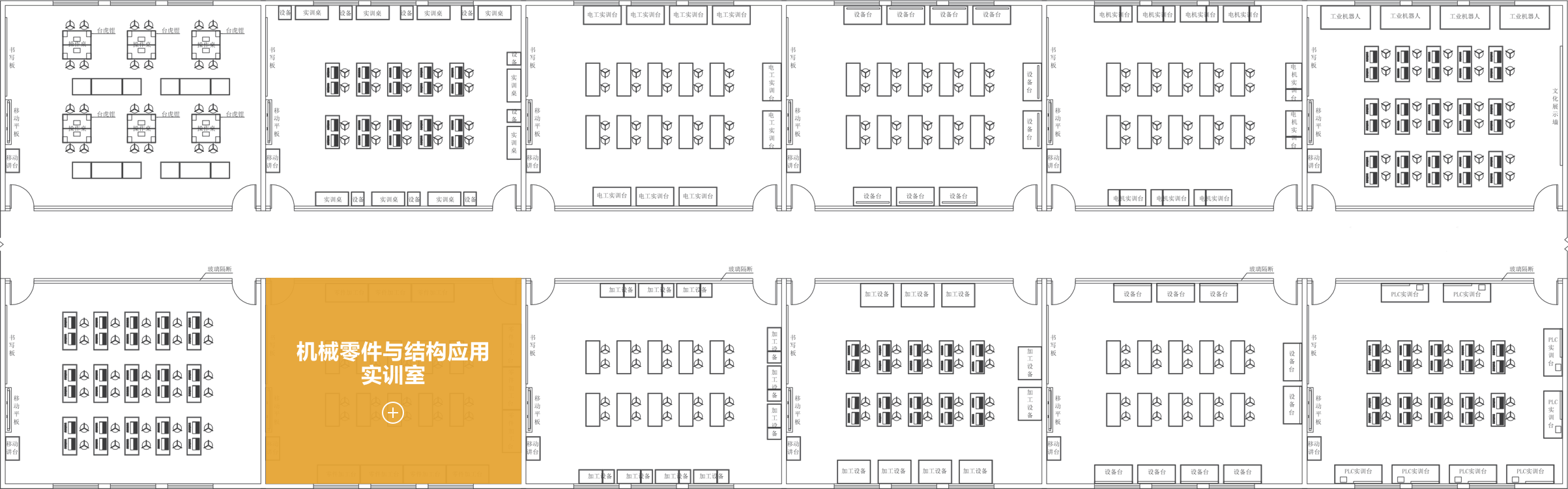
機(jī)械零件(jiàn)與結構應用(yòng)實訓室
著(zhe)重對(duì)手工(gōng)制(zhì)作(zuò)(鉗工(gōng))的(de)基本能(néng)力和(hé)專業(∏yè)能(néng)力的(de)培養。
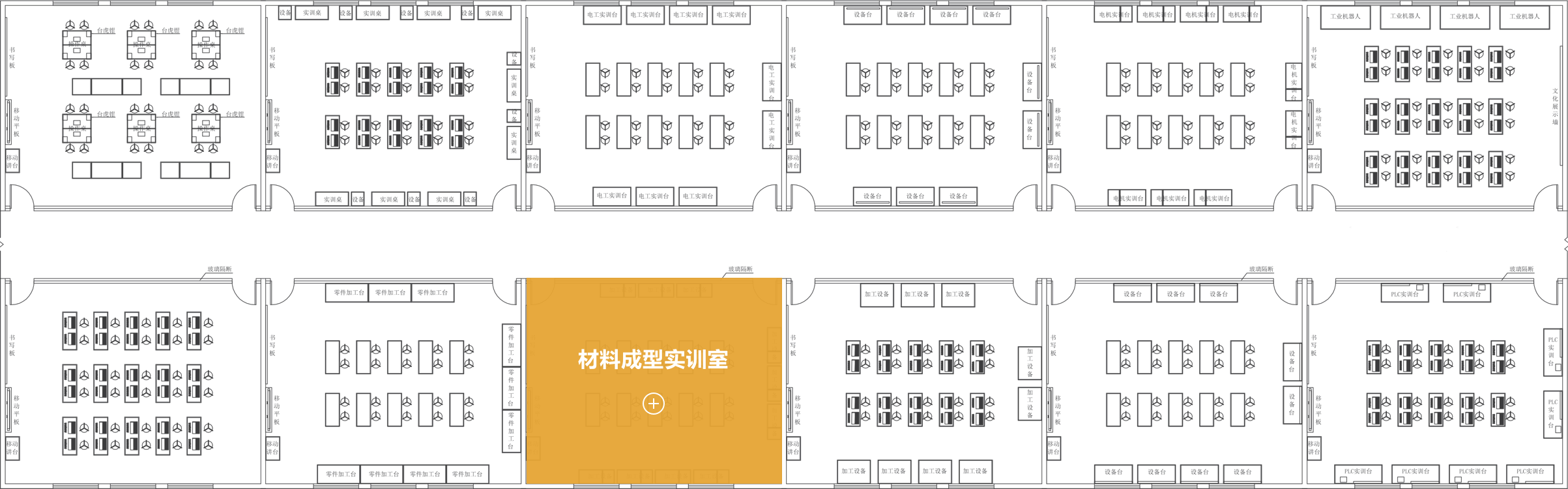
材料成型實訓室
讓學生(shēng)掌握:注/吹/擠/吸等模具之間(jiān)的(de)區(qū)别及工(gōng)藝特點,各類模具結構之間(jiān)的(de)±相(xiàng)互關系與模具配件(jiàn)的(de)應用(yòng),塑膠原料與模具制(zhì)造材料的(de)選用(yòng)及制(zhì)造工(gōng)藝的(de)要(yào)求、各類機(jī)床加工(gōng)範圍與各類刀(dāo)具特性、CNC加工(gōng)及電(diàn)火(huǒ)花(huā)加工(gōng)等工(gōng)藝規範、快(k©uài)速成型與快(kuài)速制(zhì)膜技(jì)術(shù)、熱(rè)處理(lǐ)及表面強化(huà)技(jì)術(shù)、超聲加'工(gōng)、激光(guāng)加工(gōng)、高(gāo)速切削、模具三維數(shù)字檢測技(jì)術(shù)與逆向工(gōng)程、模具的(de)×網絡制(zhì)造成形整個(gè)過程。
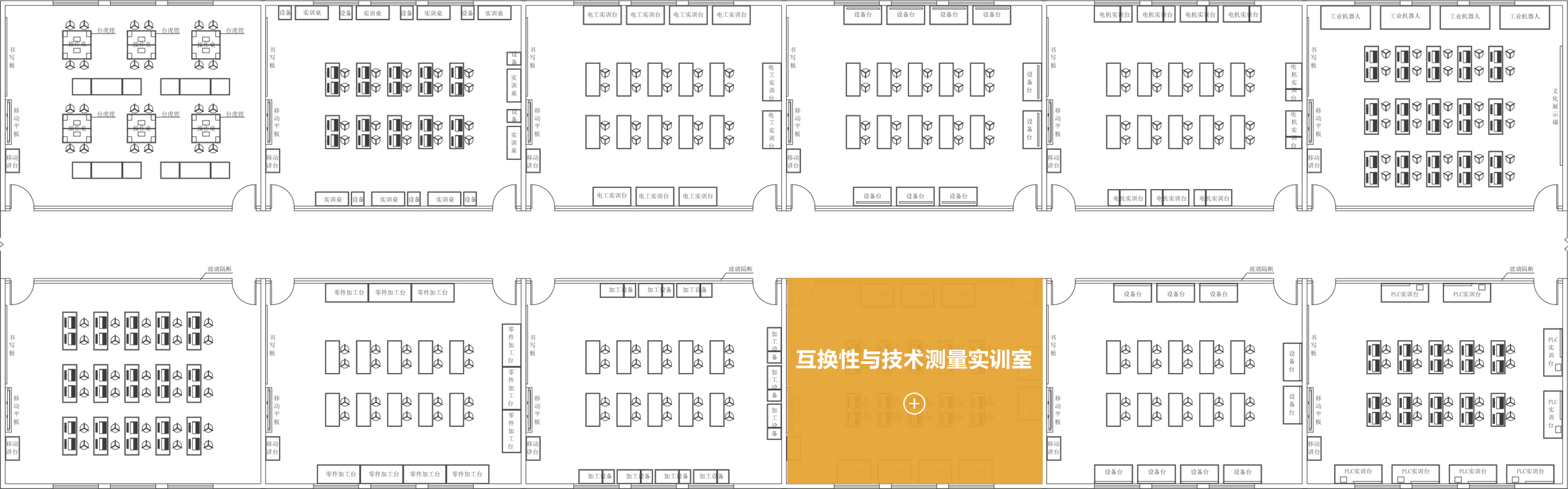
互換性與技(jì)術(shù)測量實訓室
滿足互換性與技(jì)術(shù)測量課程實驗教學中對(duì)機(jī)械加工(gōng)的(de)零件(jiàn)進行(xíng)尺寸、形狀公差、位置公差、∞表面粗糙度、齒輪加工(gōng)精度等方面的(de)技(jì)術(shù)參數(shù)進行(xíng)測量和(<hé)分(fēn)析的(de)需求。
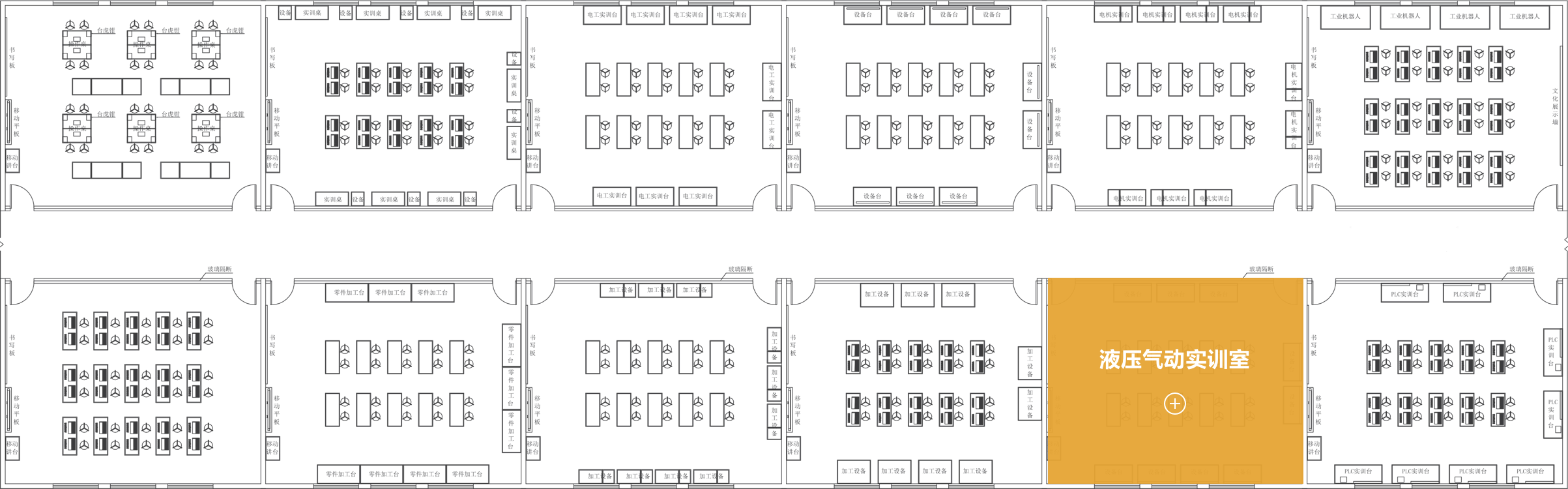
液壓氣動實訓室
促使學生(shēng)更加深入的(de)認識到(dào)液壓氣動技(jì)術(shù), 将學到(dào)的(de)課堂理(lǐ)論知(zhī)識在實驗中進行(xíng)鞏固,紮實的(₩de)掌握所學的(de)技(jì)能(néng),同時(shí)積極培訓液壓氣動的(de)知(zhī)識, 有(yǒu)效提升了(le)學生(shēng)的(de)液壓氣動技(↔jì)術(shù)能(néng)力。
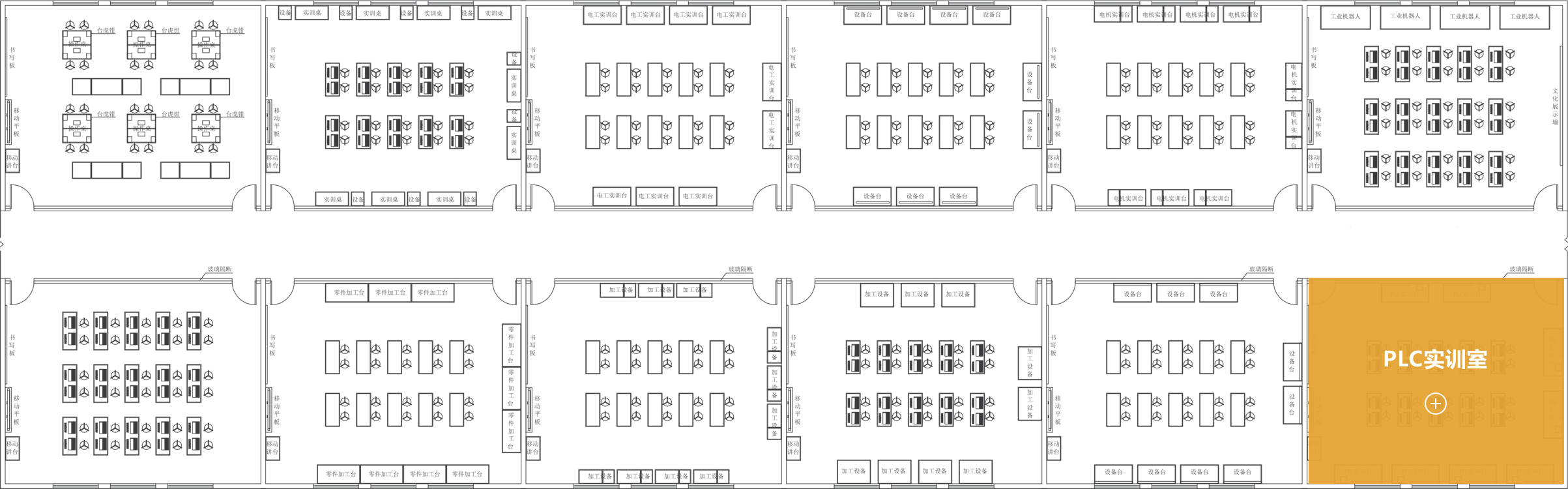
PLC實訓室
實訓室可(kě)以形象、直觀地(dì)進行(xíng)可(kě)編程控制(zhì)器(qì)的(de)基本指令練習(xí)以及多(duō)個(gè)典型工(gō<ng)業(yè)控制(zhì)過程的(de)模拟。通(tōng)過這(zhè)些(xiē)實訓使學生(shēng)掌握可(✘kě)編程控制(zhì)器(qì)的(de)基本知(zhī)識和(hé)基本技(jì)能(néng),掌握PLC程序設計(j∞ì)、運行(xíng)、調試、維護的(de)方法,能(néng)在工(gōng)業(yè)控制(zhì)現(xiàn)場(chǎng)的(de)安裝、'調試以及根據控制(zhì)要(yào)求完成PLC的(de)程序編制(zhì)與調試。

智能(néng)制(zhì)造專項技(jì)能(néng)實驗實訓平台
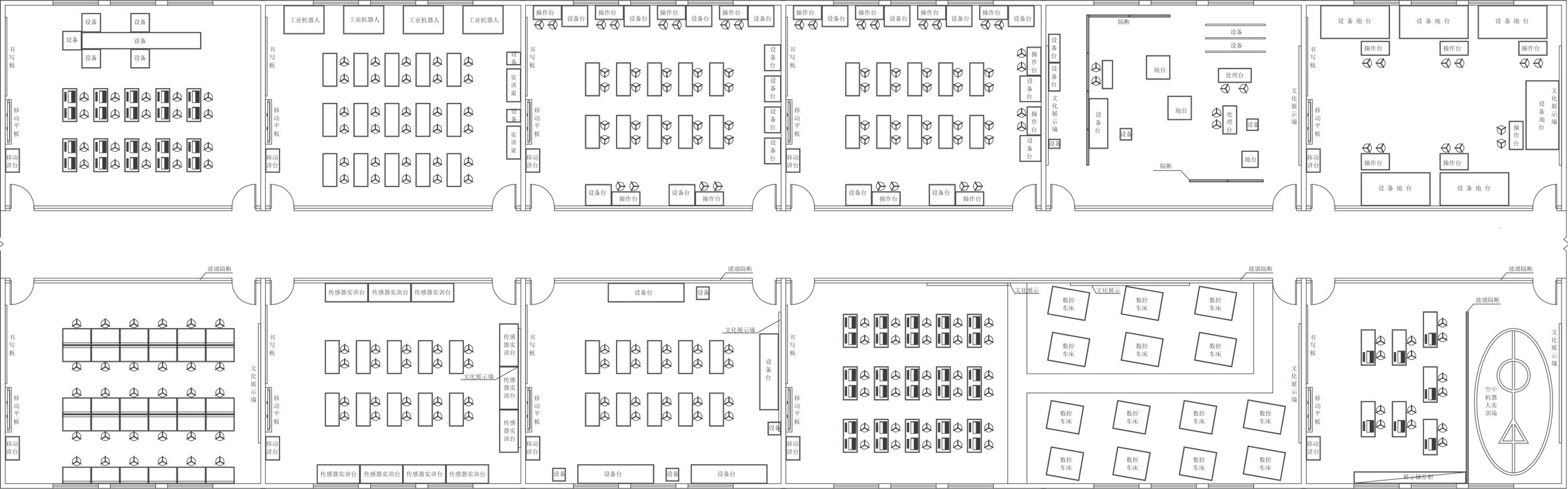
教學型智能(néng)制(zhì)造實訓室
通(tōng)過實訓自(zì)己所學的(de)知(zhī)識,能(néng)夠清楚每個(gè)項目的(→de)作(zuò)用(yòng),并知(zhī)道(dào)每個(gè)項目的(de)原理(lǐ),從(cóng)而運用(yòng)自(™zì)己所學的(de)知(zhī)識進行(xíng)機(jī)器(qì)人(rén)的(de)操作(zuò)。
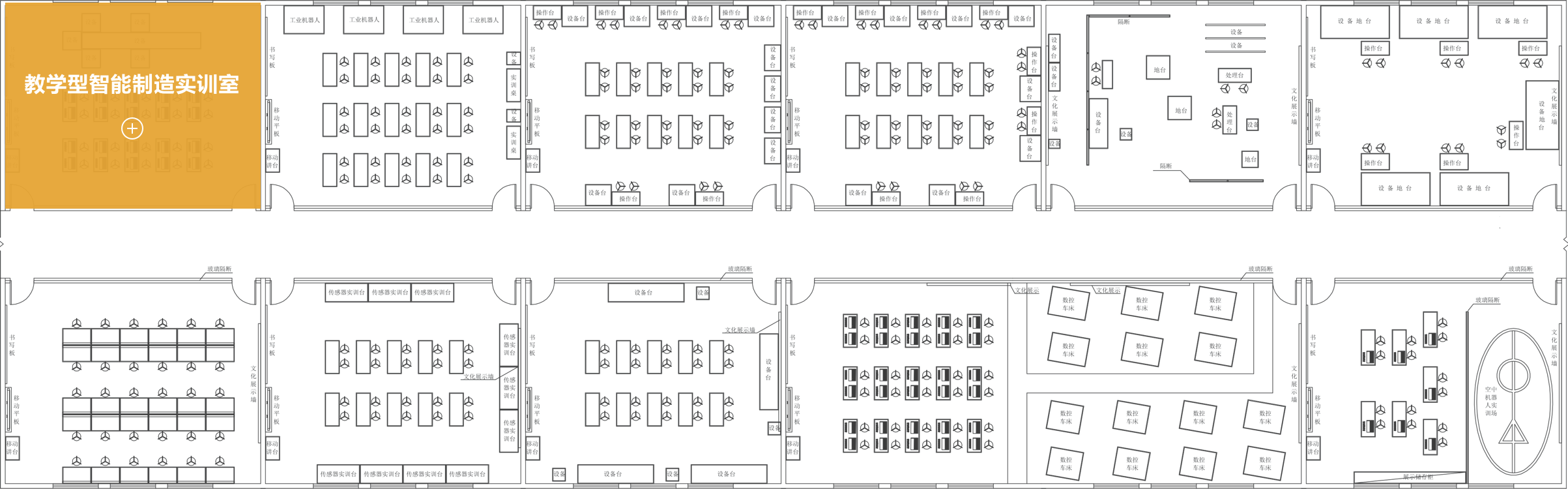
工(gōng)業(yè)機(jī)器(qì)人(rén)典型應用(yòng)實訓室
進行(xíng)基礎機(jī)器(qì)人(rén)的(de)認知(zhī)、拆裝、調試訓練;單片機(jī)和(hé)微(wēi)控制(zhì)器(qì)應用(yòng)、數(shù)字β邏輯、傳感器(qì)應用(yòng)、運動控制(zhì)規劃等涉及機(jī)器(qì)人(rén)技(jì)術(shù)相(xiàng)關課程的(de)學習(xí)和(hé)實踐,以及高(gāo)級機(jī)器(qì)人(rén)、工(gōng)業(yè)機(jī)器(qì)人(rén)的(de)研究 與應用(yòng)開(kāi)發和(hé)大(dà)學生(shēng)機(jī)器(qì)人(rén)競賽等。
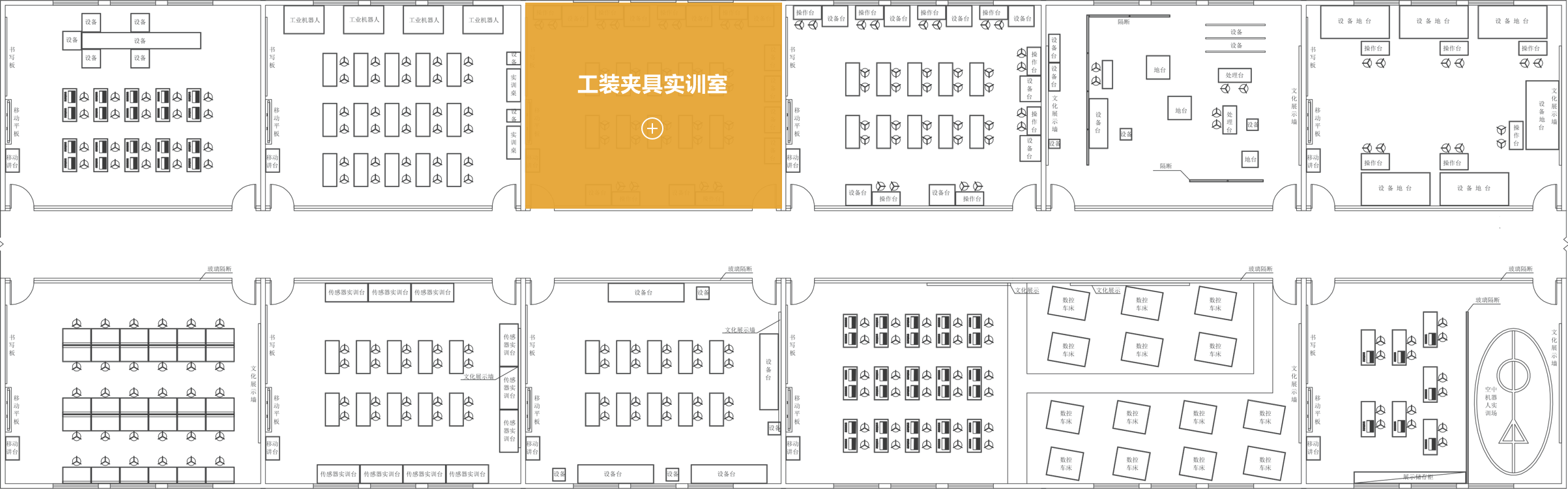
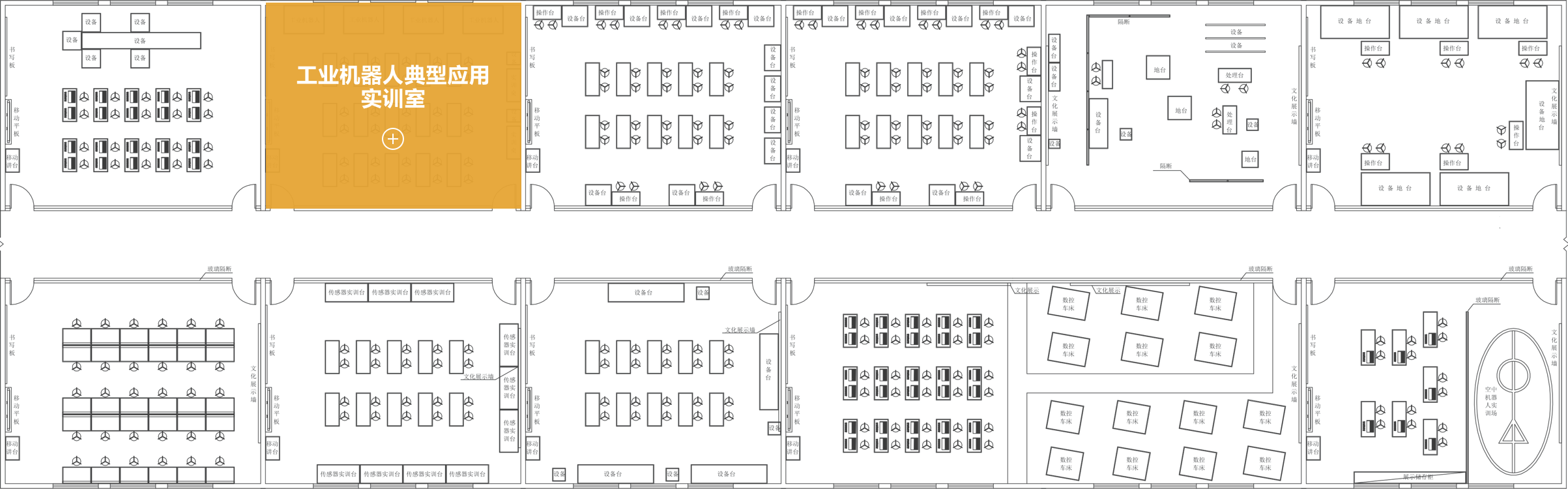
工(gōng)裝夾具實訓室
主要(yào)承擔機(jī)床夾具基本組成部分(fēn)的(de)認識實驗、各種專用(yòng)夾具的(de)拆裝實驗、各種專用(yòng)夾具的(de)測繪實驗等任務。
機(jī)器(qì)視(shì)覺實訓室
實訓室緻力于精敏視(shì)覺傳感器(qì)、高(gāo)速圖像處理(lǐ)、智能(néng)圖像識别δ的(de)研究、開(kāi)發與應用(yòng),重點解決半導體(tǐ)電(diàn)子(zǐ)、印刷包裝、機(jī)械制(zhì)造、塑料制(zhì)品、醫(yī)藥醫(yī)療等行(xín←g)業(yè)産品的(de)表面缺陷檢測、外(wài)觀尺寸測量、高(gāo)速目标定位、自(zì)動目标識别中的(de)關鍵技(jì)術(shù)問(wèn)題,大(dà)力推進機(jī)器(qì)視(shì)覺技(jì)術(shù)的(de)廣泛應用(yòng)。
智能(néng)物(wù)流實訓室
物(wù)流實訓室的(de)建設旨在搭建理(lǐ)論與實踐的(de)橋梁,通(tōng)過學生(shēng)在模拟環境中的(de)角色扮演,使學生(shēng)了(le)解物(wù)流各個✔(gè)基本環節的(de)操作(zuò)與管理(lǐ),掌握物(wù)流信息的(de)基本流程,了(le)解各物(wù)流管理(lǐ)崗位上(shàng)σ需要(yào)的(de)技(jì)能(néng),掌握物(wù)流設備的(de)原理(lǐ)與基本操作☆(zuò),培養對(duì)于物(wù)流系統的(de)設計(jì)能(néng)力和(hé)整體(tǐ)認知(zhī)管理(lǐ)能(néng)力。
移動機(jī)器(qì)人(rén)實訓室
實訓室可(kě)開(kāi)設與移動機(jī)器(qì)人(rén)/無人(rén)車(chē)結構與工(gōng)作(zuò)原理(lǐ)、ROS應用(yòng)軟件(jiàn)開(kāiσ)發、移動機(jī)器(qì)人(rén)/無人(rén)車(chē)自(zì)主導航、傳感器(qì)數(s₩hù)據采集與融合、機(jī)器(qì)人(rén)視(shì)覺等內(nèi)容相(xiàng)關的(de)各種類型的(de)實驗。
工(gōng)業(yè)物(wù)聯網實訓室
通(tōng)過塔吊實物(wù)的(de)實際運行(xíng)為(wèi)學生(shēng)提供物(wù)聯網以及自(zì)動化(huà)領域內(↕nèi)典型的(de)系統運動實例,讓學生(shēng)身(shēn)臨其境的(de)學習(xí)和(hé)探索研究,從(cóng)而實現(xiàn)理(lǐ)論和(hé)實踐的(de)無縫♠結合,提高(gāo)學習(xí)研究效率。
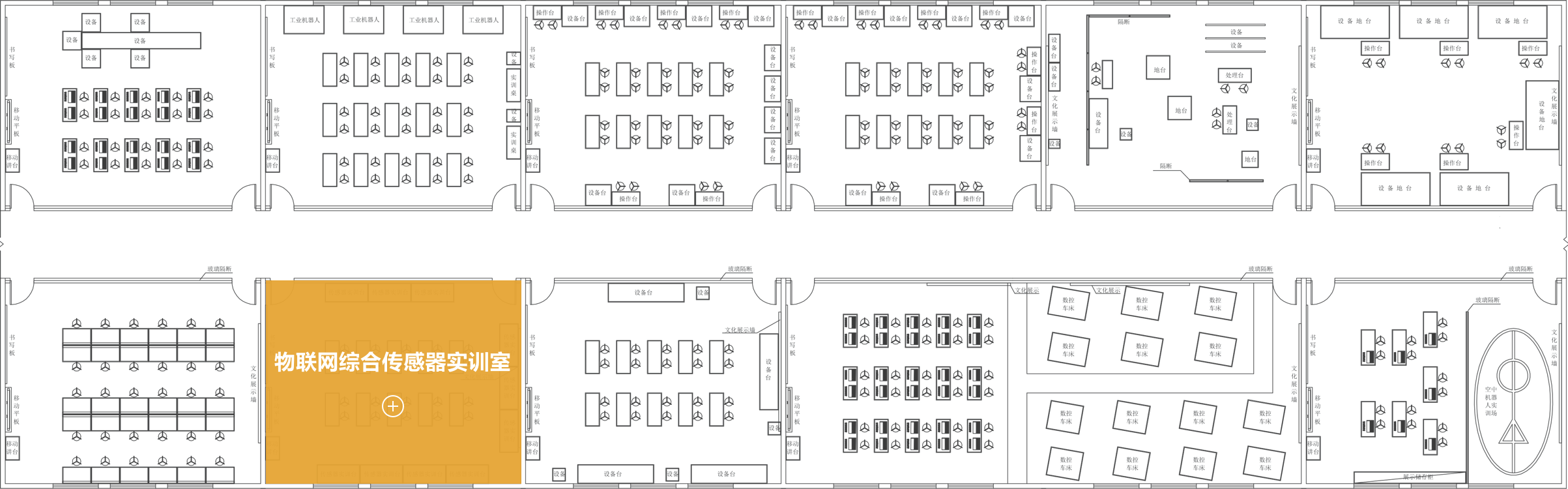
物(wù)聯網綜合傳感器(qì)實訓室
實訓室由多(duō)種物(wù)理(lǐ)量的(de)模數(shù)傳感器(qì)模塊、無線數(shù)據采集傳輸模塊和(hé)嵌入式智能(néng)控制(zhì)模塊三大(dà)功能(nénεg)模塊構成,實現(xiàn)由無線傳感器(qì)節點采集、嵌入式計(jì)算(suàn)機(jī)對(duì)前端的(de)網絡數(shù)據φ發布、網絡遠(yuǎn)端的(de)檢測系統(PC機(jī))對(duì)數(shù)據分(fēn)析和(hé)處理(lǐ)完整功能(néng→)的(de)物(wù)聯網系統,完整再現(xiàn)了(le)傳感器(qì)網絡的(de)全部內(nèi)涵,全面呈現(xiàn)網絡技(jì)術(€shù)中各個(gè)層面的(de)細節,使學生(shēng)能(néng)夠通(tōng)過學習(xí)全面系統的(de)掌握知(zhī)識。
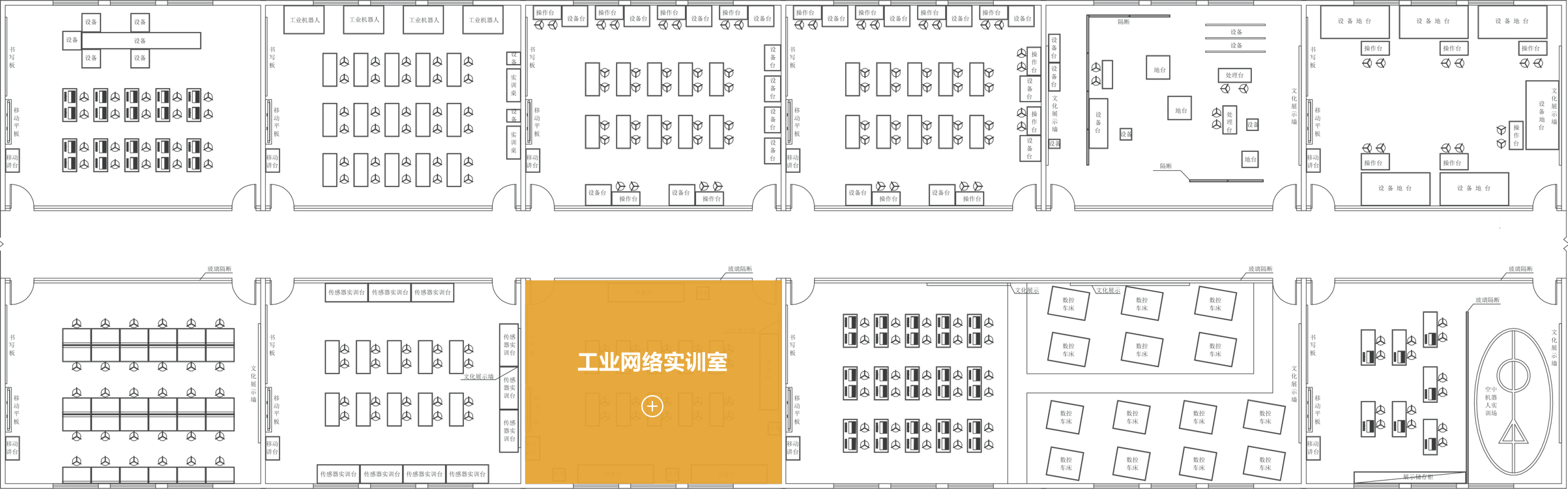
工(gōng)業(yè)網絡實訓室
采用(yòng)模拟現(xiàn)代化(huà)工(gōng)廠(chǎng)的(de)設計(jì)思路(lù),綜合集成自(zì)動控制(zhì)技(jì)術(shù),具備現(xiàn)代ε化(huà)工(gōng)廠(chǎng)所具備的(de)先進性、集成性、網絡化(huà),由此滿足高(gāo)技(↕jì)能(néng)人(rén)才職業(yè)技(jì)能(néng)培訓及高(gāo)職院校(xiào)教學科(kē)研≈需求。
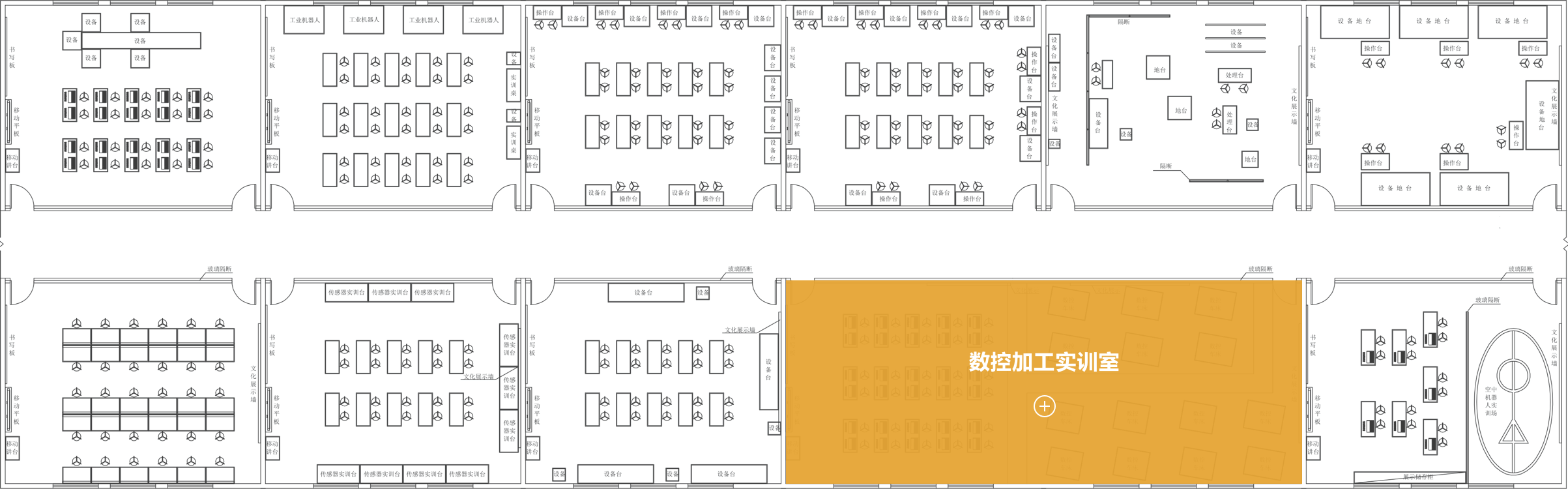
數(shù)控加工(gōng)實訓室
數(shù)控加工(gōng)實訓室是(shì)機(jī)電(diàn)工(gōng)程系學生(shēng)完成數(shù)控技(jì)術(shù)課程實踐性教學和(h±é)數(shù)控機(jī)床操作(zuò)的(de)重要(yào)場(chǎng)所。該實訓室承擔機(jī)電(diàn)工(gōng)程系★機(jī)械制(zhì)造及自(zì)動化(huà)、機(jī)電(diàn)一(yī)體(tǐ)化(huà)技(jì)術(shù)♣、精密機(jī)械技(jì)術(shù)、數(shù)控技(jì)術(shù)、數(shù)控設備應用(yòng)與維護、模具設計(jì)與制(zhì)造、計(jì)算(suàn)機(jī)輔助₽設計(jì)與制(zhì)造等專業(yè)的(de)數(shù)控編程及加工(gōng)、數(shù)控加工(gōng)工(gōng)藝等課程的(de)實訓任務。用(yòng)于培養學生(shēΩng)數(shù)控編程和(hé)數(shù)控機(jī)床實際操作(zuò)技(jì)能(néng)。
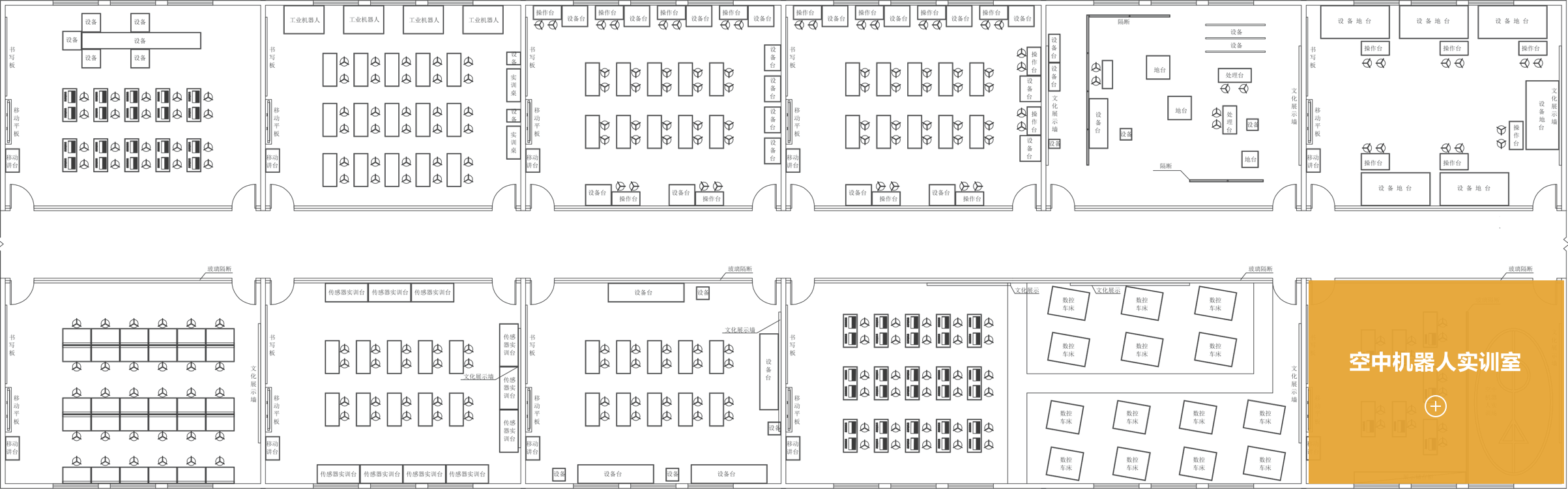
空(kōng)中機(jī)器(qì)人(rén)實訓室
實訓室将理(lǐ)論與實際操作(zuò)結合起來(lái),通(tōng)過學生(shēng)實際操作(zuò)引導學生(shēng)對(duì)科(kē)技(jì)興Ω趣,引導學生(shēng)對(duì)數(shù)學、物(wù)理(lǐ)等學科(kē)知(zhī)識的(de)理(lǐ)解。
智能(néng)制(zhì)造公共綜合實驗實訓平台
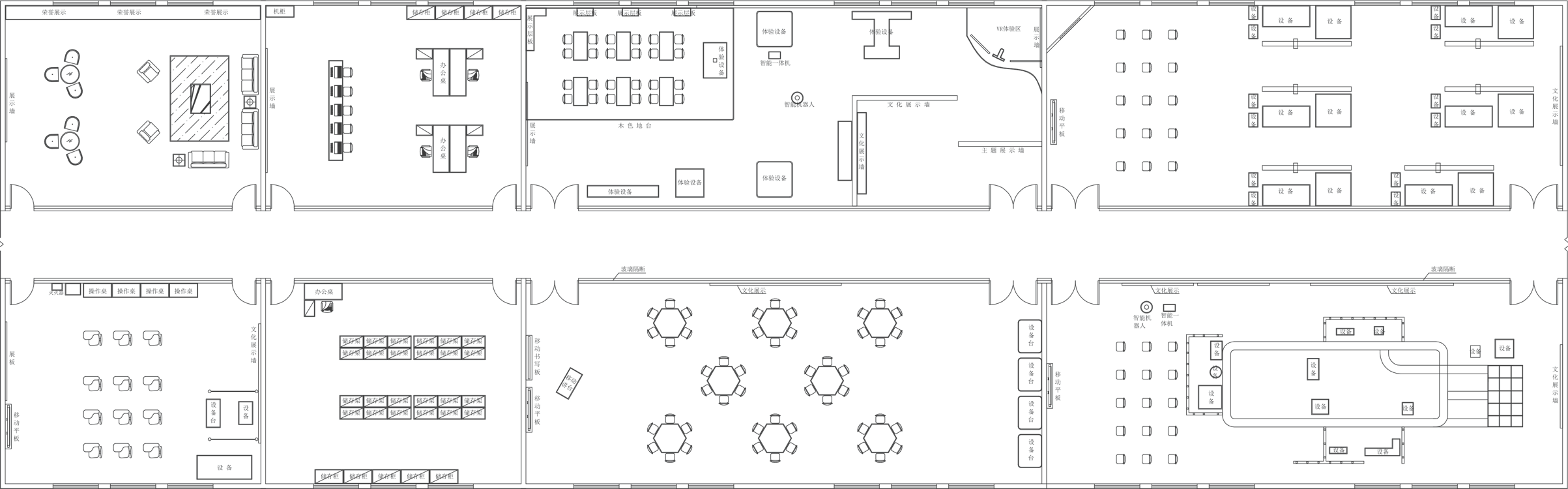
來(lái)賓接待室
來(lái)賓休息接洽及討(tǎo)論空(kōng)間(jiān)。
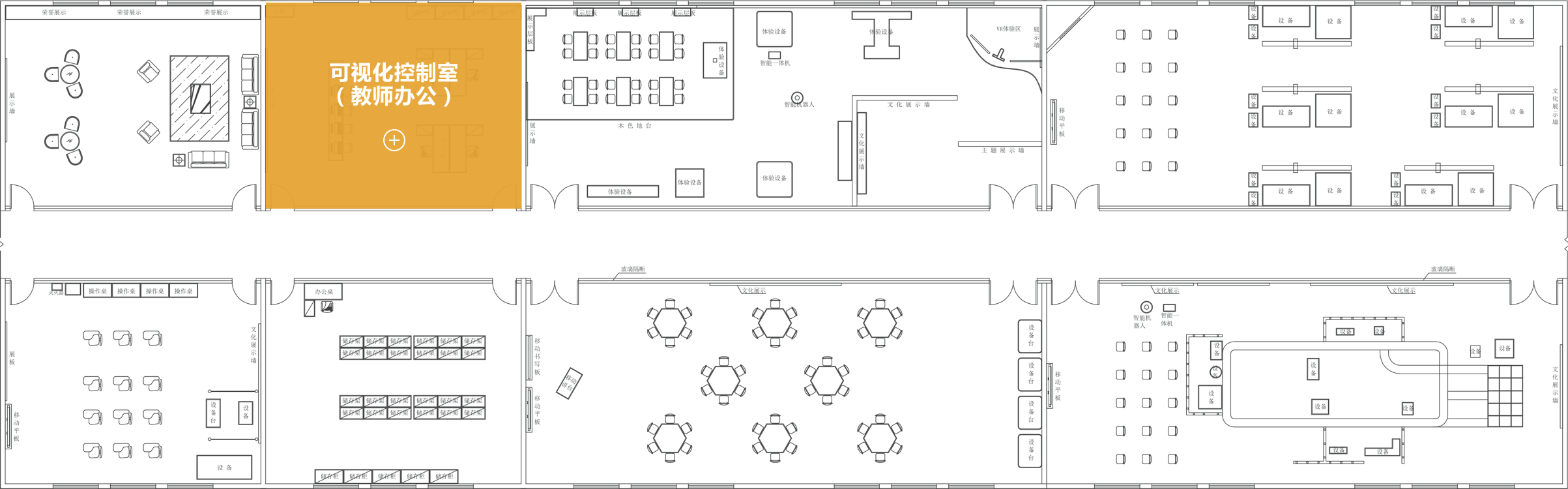
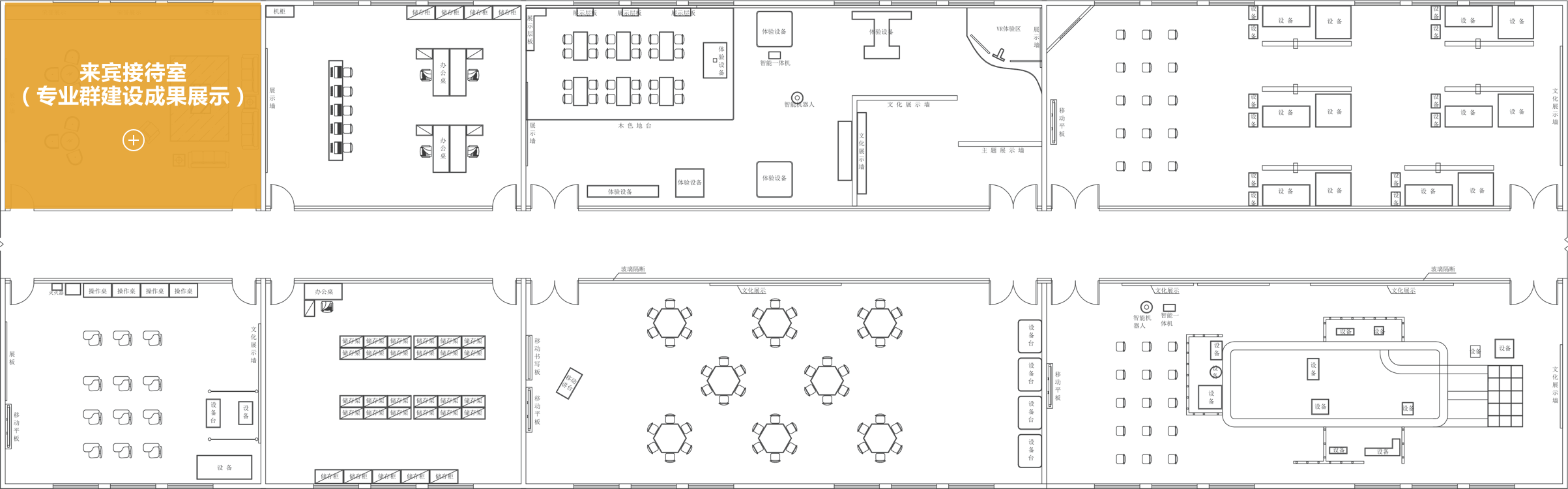
可(kě)視(shì)化(huà)辦公室
轉變了(le)傳統的(de)視(shì)頻(pín)監控的(de)顯示方式,從(cóng)數(shù)以萬計(jì)的(de)圖像信息中快(kuài)速、準确捕捉關鍵事(₩shì)件(jiàn)。這(zhè)已不(bù)是(shì)簡單的(de)信息呈現(xiàn),而是(shì)将場(chǎng)景模式定義、×仿真預案、實時(shí)信号采集、多(duō)維信息關聯等進行(xíng)“信息彙聚”的(de)可(kě)視(shì)化(huà)控制(zhì)室。
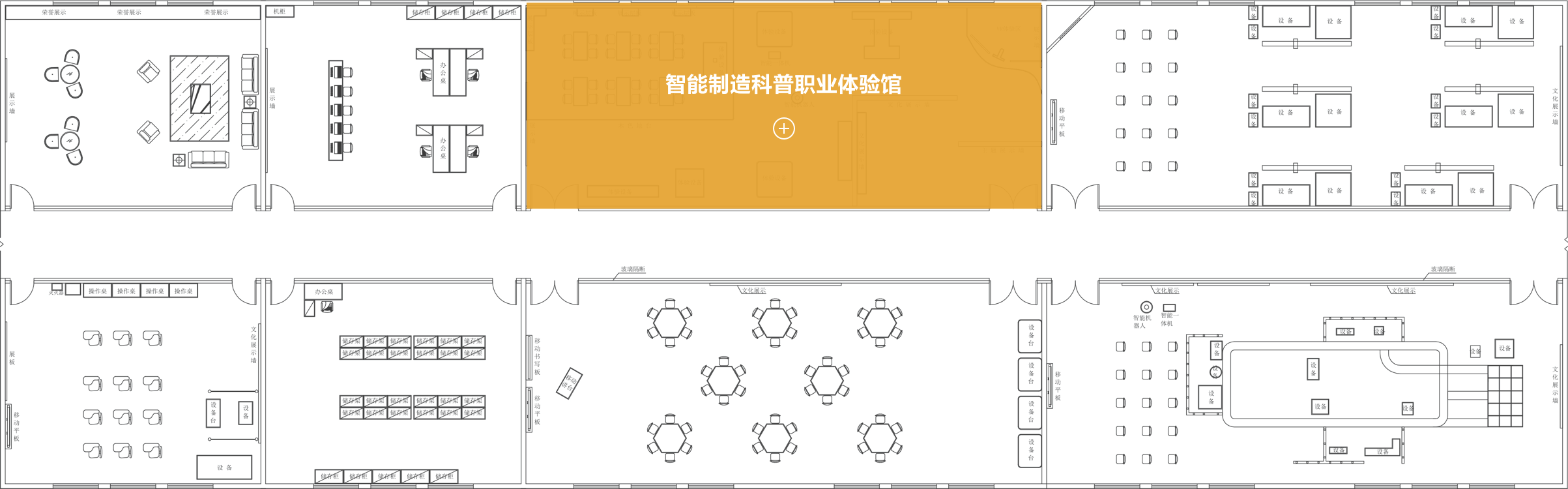
智能(néng)制(zhì)造科(kē)普職業(yè)體(tǐ)驗館
緻力于機(jī)器(qì)人(rén)關鍵性技(jì)術(shù)的(de)研發與社會(huì)推廣,充分(fēn)利用(yòng)形象的(de)機(jī)器(qì)人(rén)作★(zuò)品展現(xiàn)機(jī)器(qì)人(rén)技(jì)術(shù)的(de)特點——智能(néng)性、易用(yòn g)性和(hé)趣味性。
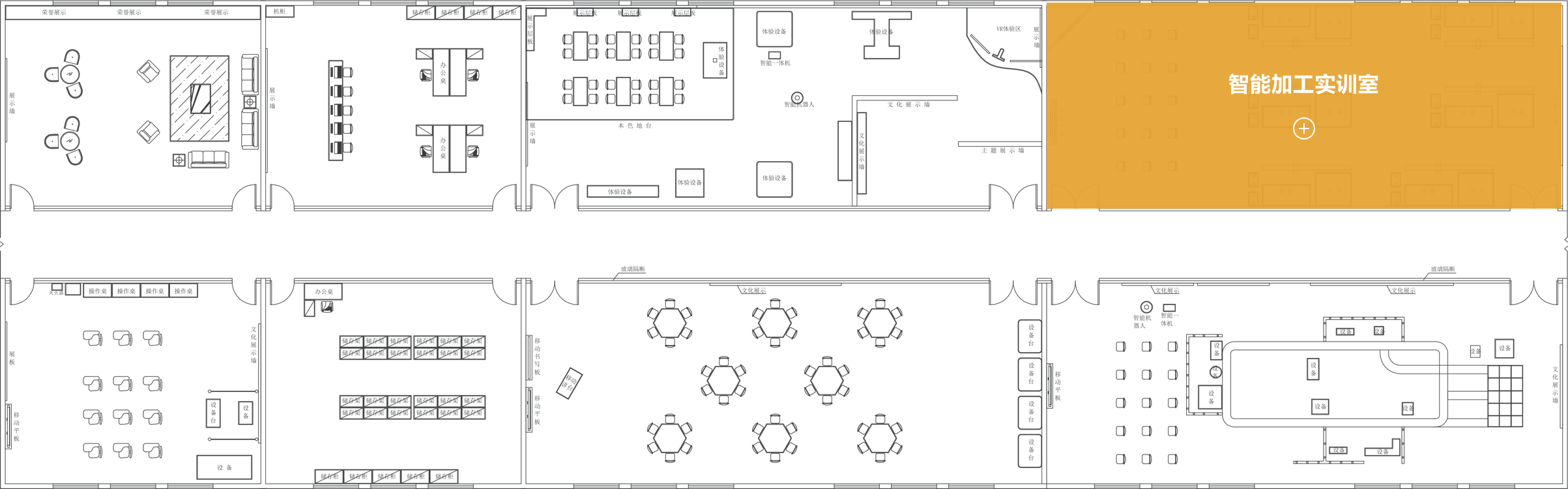
智能(néng)加工(gōng)實訓室
為(wèi)大(dà)專院校(xiào)、中高(gāo)職學生(shēng)自(zì)動化(huà)專業(yè)、機(jī)電(diàn)一(yī)體(tǐ)化(huà)專業(yè)、機(jī)器≈(qì)人(rén)專業(yè)、企業(yè)工(gōng)程師(shī)進行(xíng)機(jī)器(qì)人(rén)、數(shù)控加工(gōng)、材料出入倉庫進一(yī)體( tǐ)化(huà)組建工(gōng)業(yè)4.0智能(néng)無人(rén)工(gōng)廠(chǎng)培訓,提高(gāo)階∞段綜合性學習(xí)與訓練。
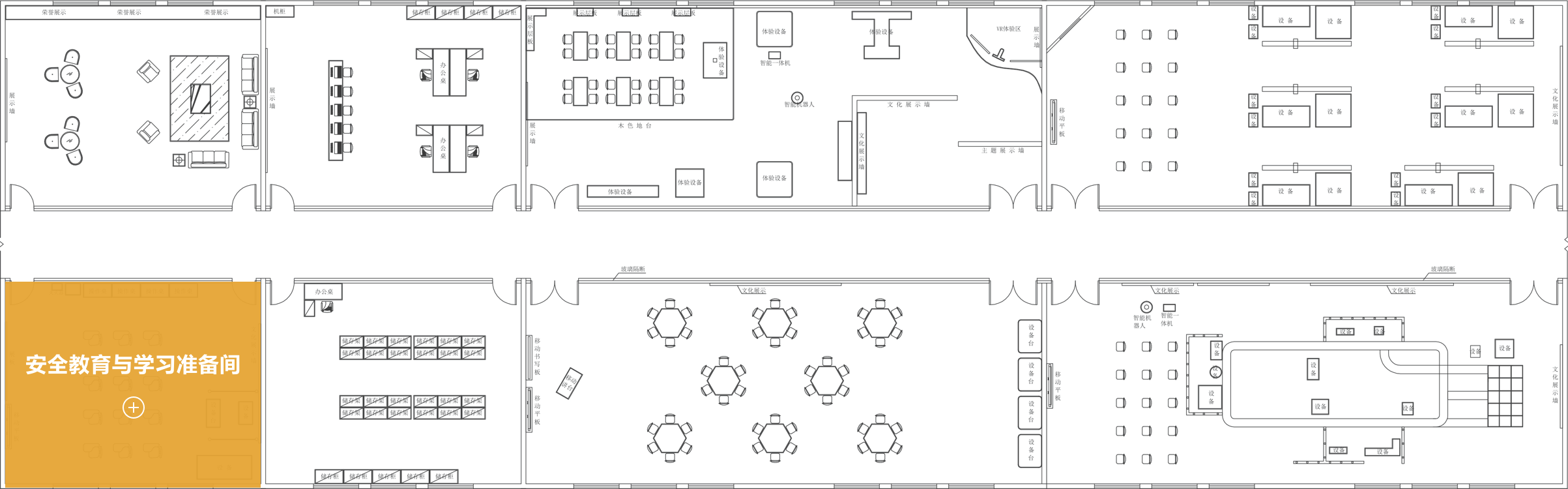
安全教育與實訓準備間(jiān)
掌握安全知(zhī)識,培養學生(shēng)全意識的(de)學習(xí)空(kōng)間(jiān)。
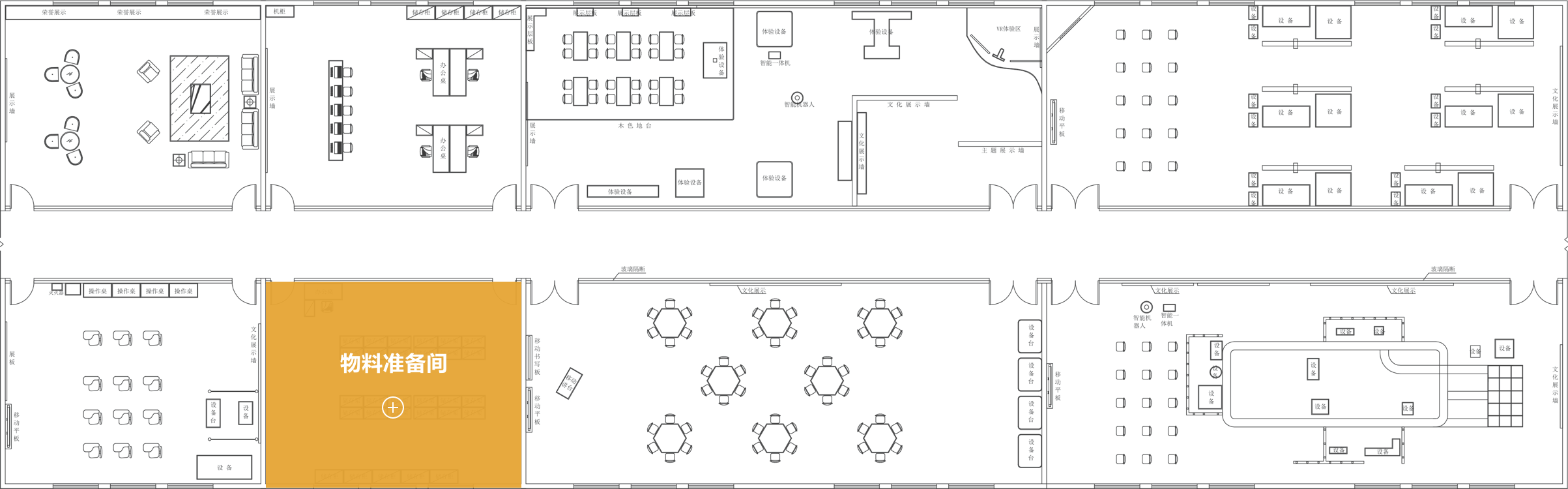
物(wù)料準備間(jiān)
物(wù)料的(de)儲存堆放(fàng)空(kōng)間(jiān)
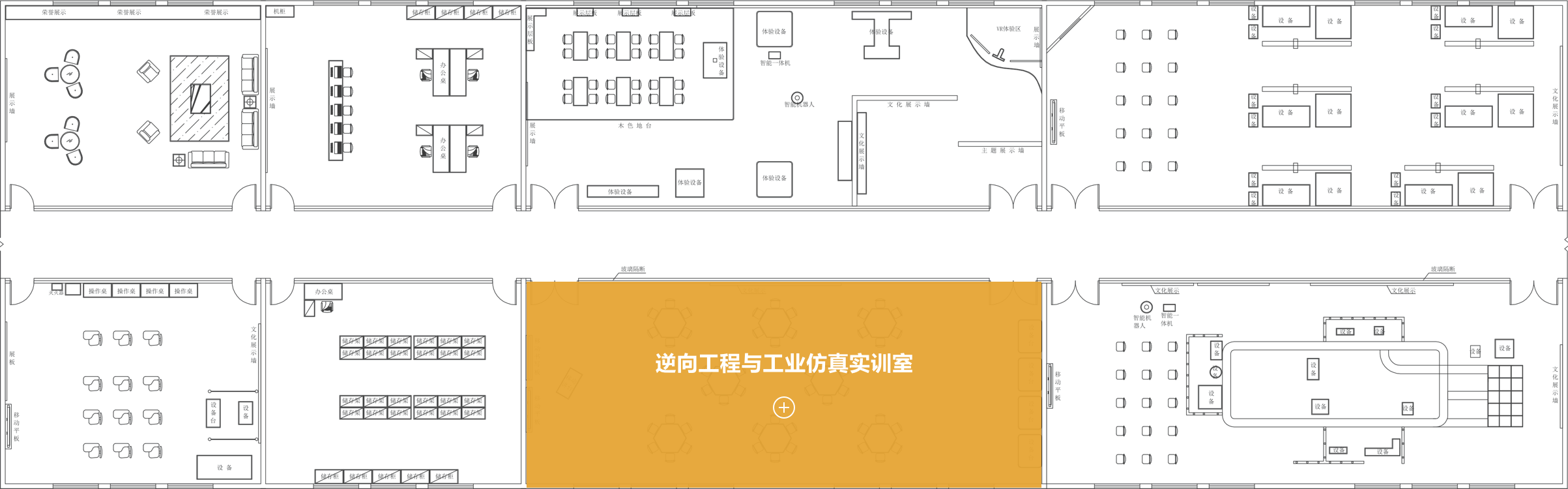
逆向工(gōng)程與工(gōng)業(yè)仿真實訓室
借助VR/AR/MR技(jì)術(shù)、信息技(jì)術(shù)、三維掃描、無人(rén)機(jī)逆向工(gōng)程等技(jì)術(shù),整合信息化>(huà)教學資源,實現(xiàn)工(gōng)程虛拟仿真與理(lǐ)論教學、工(gōng)程虛拟仿真與實訓教學、創新創業(yè)實習₽(xí)實踐的(de)三位一(yī)體(tǐ)。
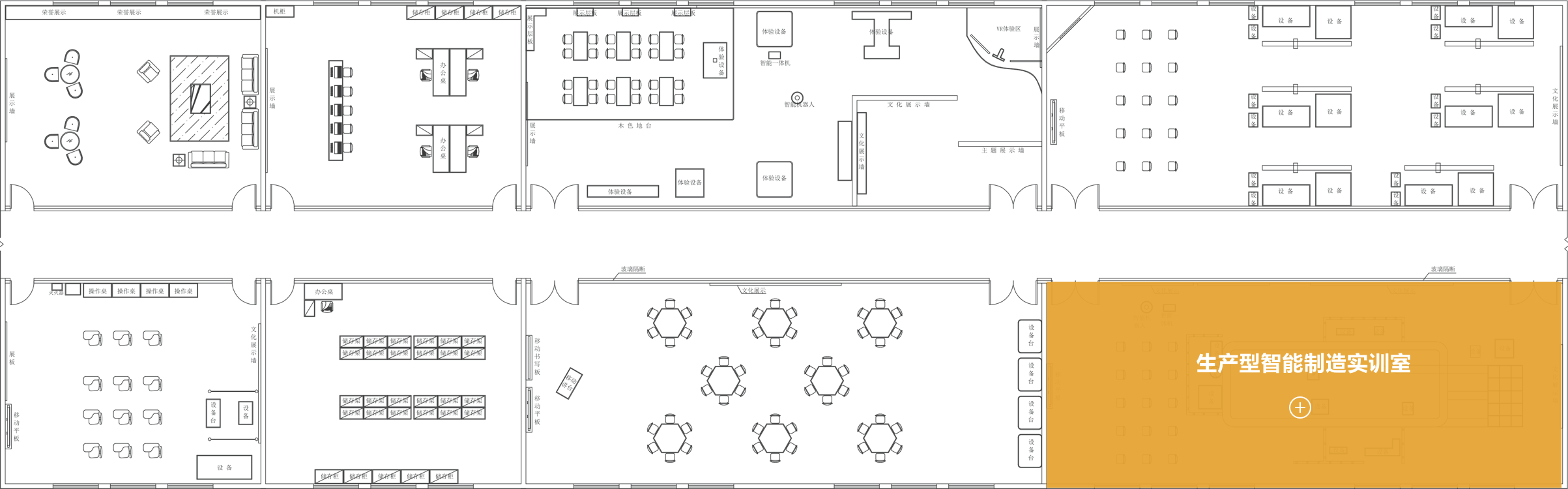
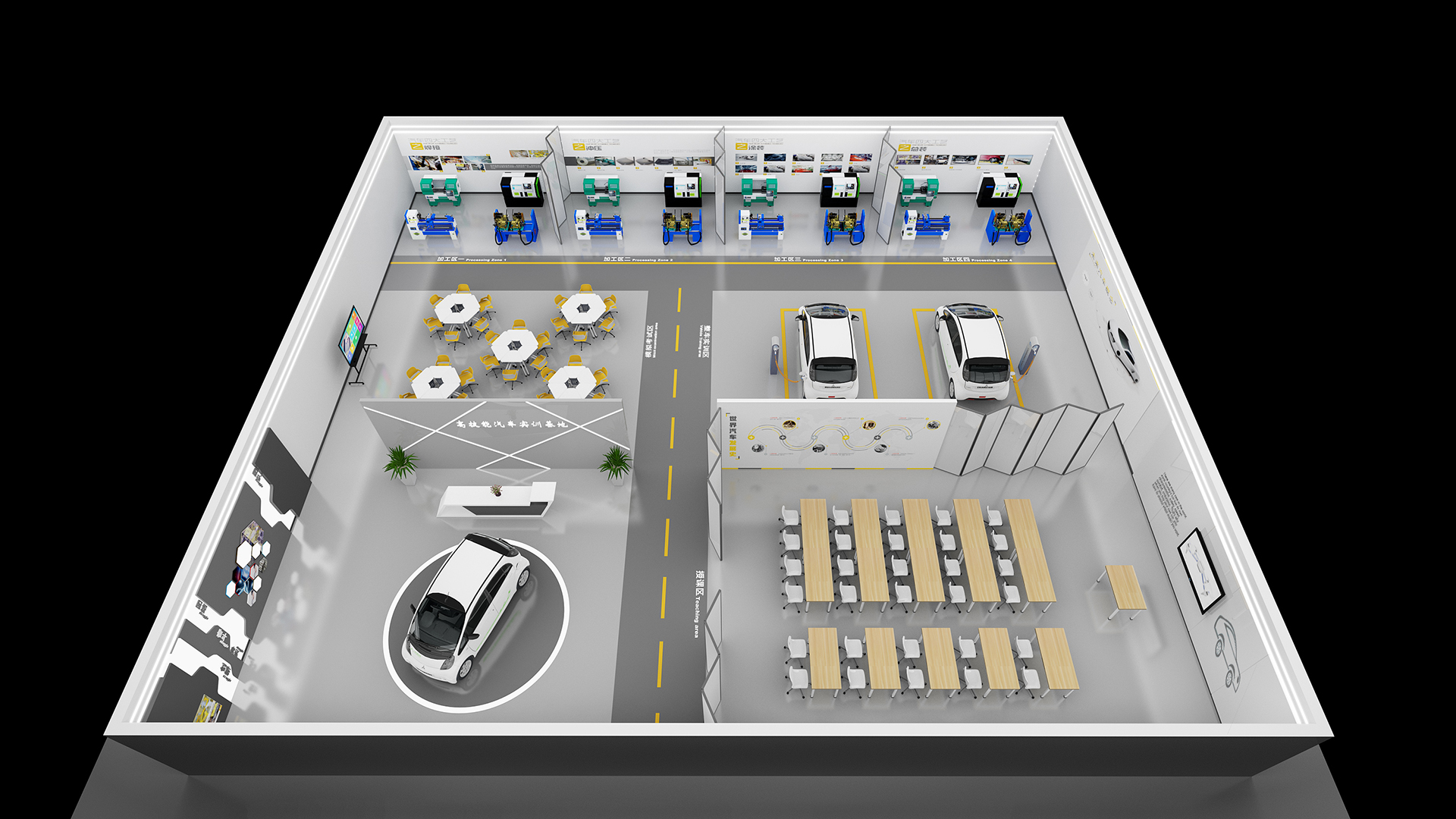
生(shēng)産型智能(néng)制(zhì)造實訓室
實訓室主要(yào)面向工(gōng)業(yè)機(jī)器(qì)人(rén)技(jì)術(shù)、模具設計(jì)與制(zhì)造、機(jī)電(diàn)等機(j♠ī)械制(zhì)造專業(yè)适應制(zhì)造業(yè)轉型、專業(yè)建設改革升級,主要(yào)進行('xíng)基于工(gōng)業(yè)機(jī)器(qì)人(rén)各類工(gōng)藝應用(yòng)性實訓。
逆向工(gōng)程與工(gōng)業(yè)仿真實訓室
智能(néng)制(zhì)造公共綜合實驗實訓平台智能(néng)制(zhì)造公共綜合實驗實訓平台智能(néng)制(zhì♦)造公共綜合實驗實訓平台智能(néng)制(zhì)造公共綜合實驗實訓平台








天山(shān)中學組培